

決してテレビ東京のプログラム名ではありません(笑)

昨日のエントリー記事の取材の前日、以前よりお世話になっている北海道立総合研究機構十勝農業試験場を訪問しました。お許しを得て、弊社のPhantom 4 Proをフライトさせていただき、試作したカメラシステムの使い勝手や性能、それを載せたドローンがどんな塩梅かをテストさせていただきました。
まずは1枚目の写真、というかキャプチャ。Phantom 4 Proのカメラで撮った動画のキャプチャです。偏向レンズに付け替えておけば多少は違ったのかもしれませんが、西日の影響が…。いや、そもそも畑に防風林の影がバッチリ映っていますね。奥のほうには試験栽培している小麦と思われる植物体が確認できますが、もう冬の準備といった感じで、均された圃場がとてもきれいです。

で、こちらが試作カメラシステム。安い広角レンズゆえ仕方ないですが、西日の影響が酷いですね。。。とはいえ、真ん中の圃場の長辺は200mほど、ドローンは高度100m弱といったところですが、ちゃんと1枚の写真に納まってますね。
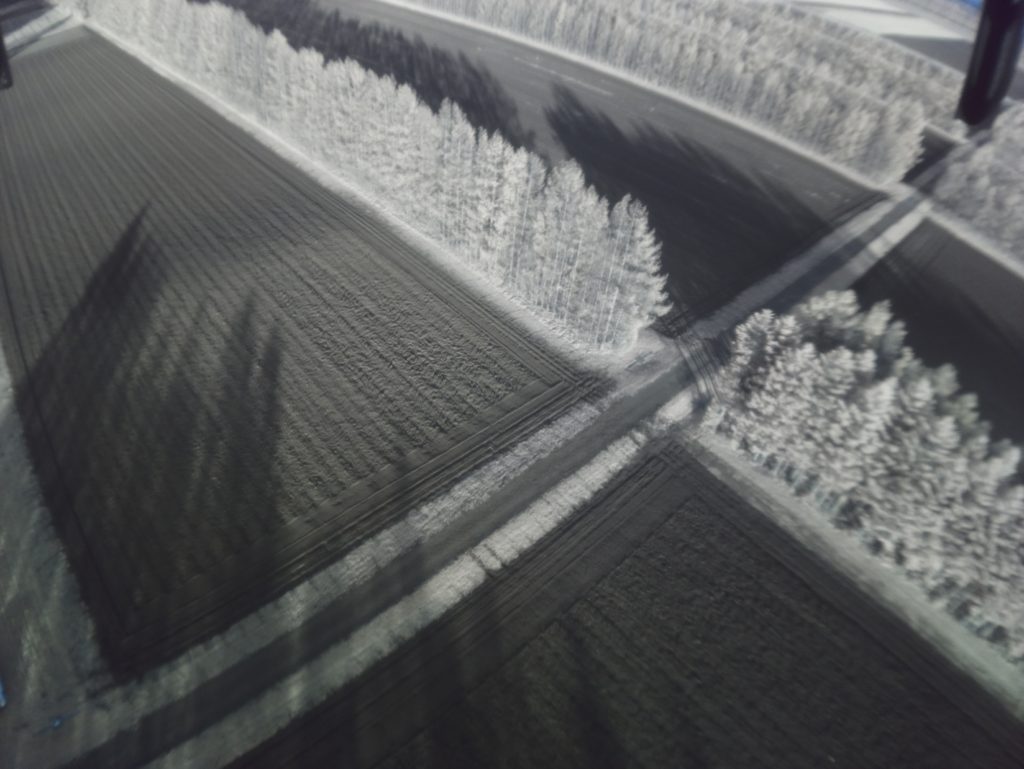
可視でも多少は確認はできてはいましたが、土壌の水分の違いが色になって現れてます。道路側は耕起したばかりとのことで、その部分は白っぽくなってます。ふむふむ、なるほど。

ドローンのあとは、UbloxのRTKキットで圃場外周データを計測。2枚目の写真の、白い物体(この車です)の横らへんに基地局を立ててます。この通り、防風林そばなのでRTK-Fixなんて期待してません!実際、この場所ではFloatやらSingleやら途切れ途切れで、ちょっと止まって様子見していたわけです。会社の近所の公園でテストしたローバーセットを、車の載せて走りました。ファッションSUVだとはいえ、車高が高いといいですね(笑)
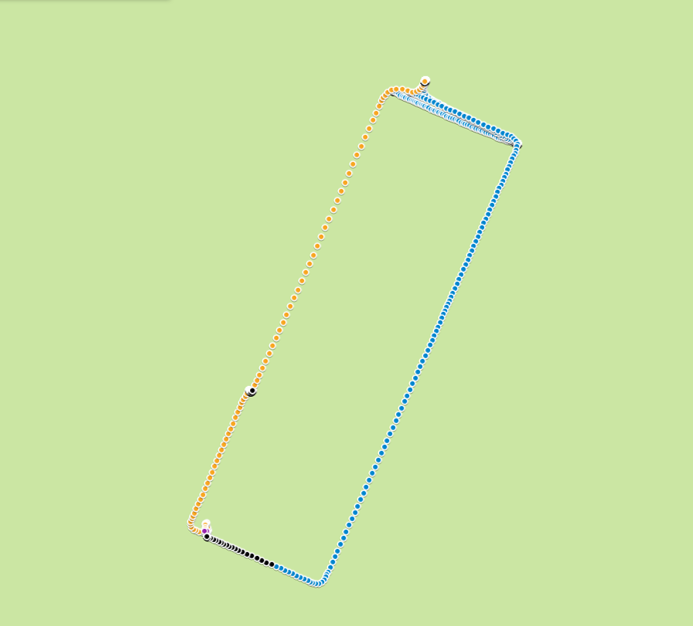
基地局は上短辺側。ローバーを車に載せ、時計回りに測ってます。青がRTK-Fix、黄色はFloat、紫がDGPS、黒がSingle。車を止めていたのは、左側長辺の途中です。反対周りもやってみましたが、向こう側へいくとFixしなくなり、その後はFloatっていう傾向は同じです。後部座席に受信機を放り投げてたせいなのかな。補正信号を受けられるように車外にちゃんと設置していれば、また結果は違ったのかな。数kmは飛ぶはずですもんね、たしか仕様では。あ、Floatになっているから、信号は受けているはずだよね。今度はてくてく歩いて調べてみようかな。

さすがに畑の中には入りませんでしたが、中だとどうなるのか、ちょっと知りたいですよね。
2周波のDGNSSとの精度比較をしたら、どういう結果になるんですかね。RTKを外してもそれなりの精度は出ますよ、っていうことになれば、2周波DGNSSより優位ってことですもんね。スマート農業フェアに出展されていたようなロボットトラクタだと困ることになるんでしょうが、オートガイダンスなら、「防風林の横は勘弁してね」って但し書きしておけば、許してくれそうですよね。
そんなこんなで、なかなか楽しいテストでした。お付き合いいただいた試験場の原主査には、本当に感謝です。