

前回の続きです(すんごく更新間隔開いちゃいましたが…)
AVIA本体にはデータを保存したりする仕組みは備わっておりません。よって、計測したデータをPC等で受け取り、アプリ等を利用して保存する必要があります。LIVOXからはViewerアプリがWindows版、Linux版の両方が提供されていますが、まさにViewer程度の機能しか備わっておりません。痒い所を掻きたい場合は、LIVOX SDKを利用してアプリの自作が必須となります。うーん、ハードルが高いですね
(^o^;
もうひとつ。このLiDARは”全周カメラ”のように「置けばぐるり360度のデータが撮れる」というわけではありません。細かいスペックはさておき、AVIAは横方向70度程度の視界です。そのため、空間情報(3Dモデル)を得たい場合には一工夫必要で、例えばドローン等による写真測量のように、特徴点を見つけてデータ同士を少しずつ重ね合わせていくような方法をとる必要があります。「スラム (Simultaneous Localization and Mapping; SLAM)」というようですが、何かしらのセンサ(GNSSや加速度計)とデータを同期させ自己位置を推定し、地図も作りましょうという話です。
地図は出力しないけど、お掃除ロボットや草刈り機などに使われている技術ですね。iPhoneやiPadに備わっているLiDARと可視カメラを使って立体画像が作れちゃう神アプリもありましたね。
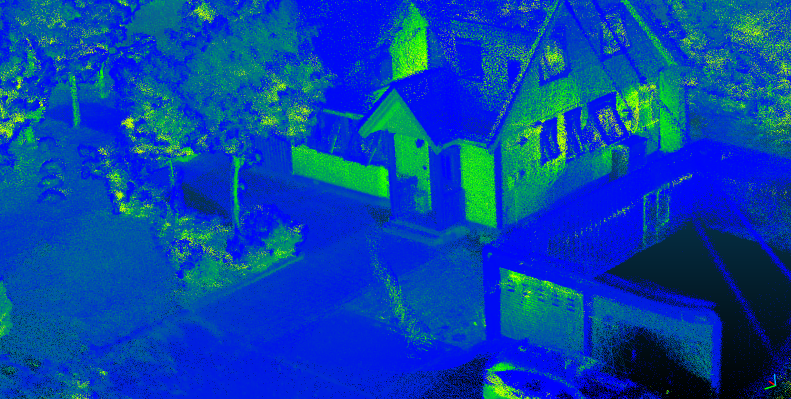
…と、前置きが長くなりましたが、お掃除ロボットの脳みそをPCに移植できればOK、という、ざっくりとした方針です。その方針に従って環境を構築すると、上のような点群データが得られます。が、残念ながら、Windowsでは…
(^o^;
UbuntuやRaspberry Pi OSなど、Linux環境ではオープンソースなアプリが公開されています。Windows上で動くものを作ったり買ったりするより、Linux環境を構築したほうが手っ取り早そうです。
とは言ったものの、使っていない・OSを壊してもいいノートPCなんて、弊社のような貧乏企業にはございません
(^o^;
弊社だけではなく、普通は「ノートPC = Windows」ですよね?
(最近はMacBookばかり使っていますが)
ということなので、必然的に選択肢は絞られまして…
「Windows PCのなかにLinux PCをつくる」Hyper-Vのお世話になりましょう、と。バーチャルPCってやつです。
簡単そうで、ただ適当に進めるとドツボにハマるという…
(Part 2に続きます、しばし、お付き合いのほど…)